Operating the BearCar
Once your hardware is assembled and the software is installed and tested, you are ready to collect data and train an autopilot.
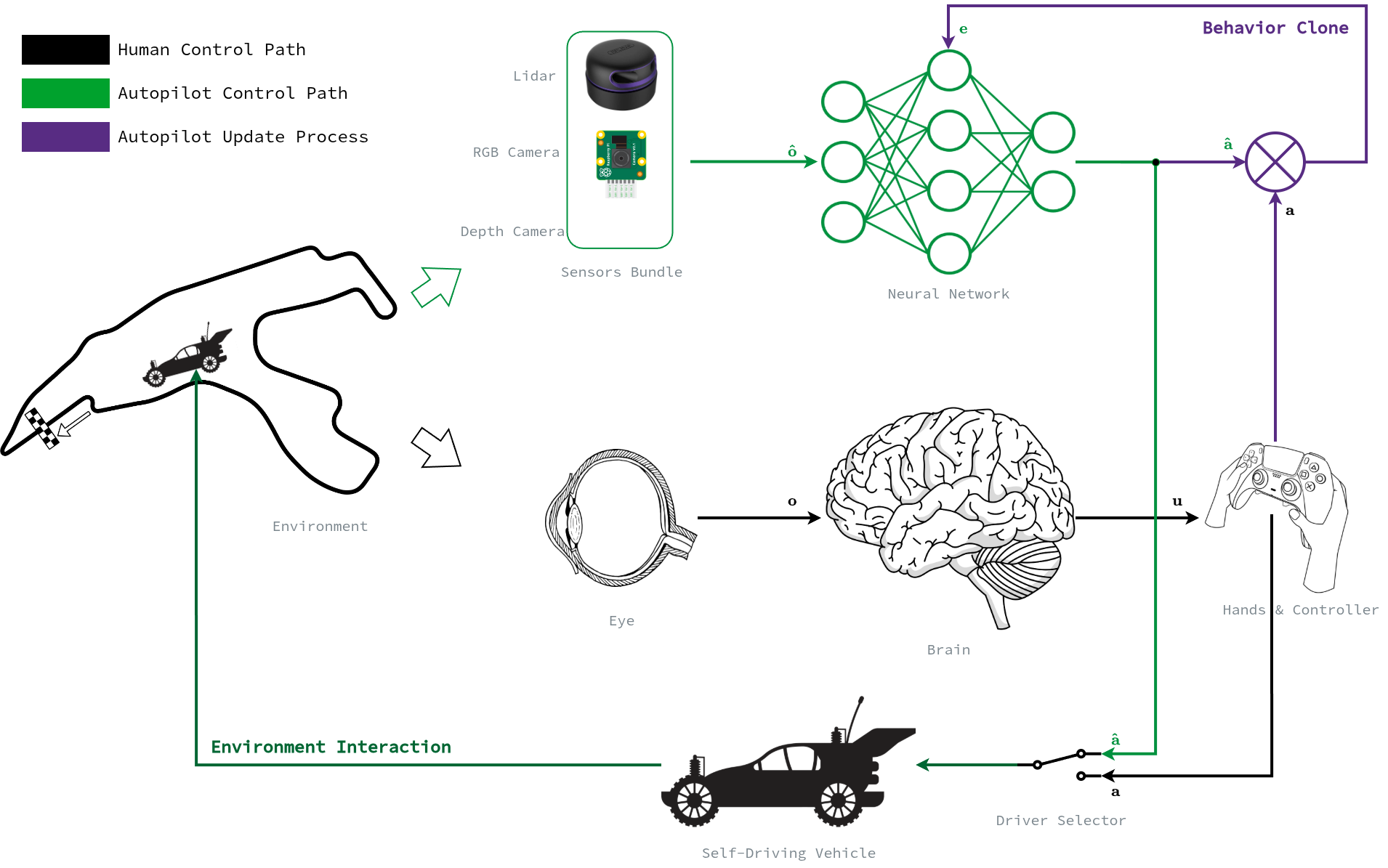
The BearCar operates using a Behavioral Cloning pipeline. This means the car learns to drive autonomously by mapping your manual driving inputs to the images it sees through its camera. Because of this, operating the car always follows a three-step loop.
Work through the following steps in order:
Step 1: Manual Driving & Data Collection
Learn how to start the vehicle service, arm the recording loop, and drive the car manually to capture high-quality training data.
Step 2: Training the Autopilot
Transfer your captured images with paired steering and throttle values to a computation dedicated server, run the neural network training scripts, and generate your custom autopilot model.
Step 3: Autonomous Deployment
Load your newly trained model weights back onto the Raspberry Pi, and let the car drive itself.